
martes, 6 de junio de 2017
Comenzando con Robot Operating System (ROS)
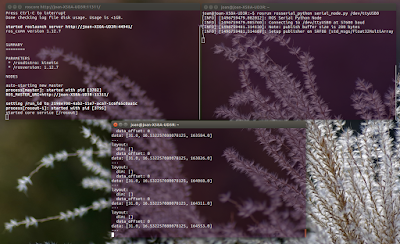
Hacía tiempo que quería comenzar con el famoso framework Robot Operating System (ROS), he comenzado por instalar ROS en una Rasberry Pi y en un PC con Ubuntu, se tiene que reconocer que la instalación es larga y algo compleja por lo que es recomendable seguir los paso que podemos encontrar el la página oficial, una vez realizada la instalación de ROS y para poder realizar pruebas fácilmente he usado un arduino nano, lo que hace necesario instalar rosserial y crear e instalar las librerías para arduino... este es el primer código para la primera prueba que consiste en usar un sensor SRF08 de ultrasonidos y publicar la distancia leída, el valor del sensor LDR y el periodo de tiempo.
Suscribirse a:
Enviar comentarios (Atom)
No hay comentarios:
Publicar un comentario